










水星Mercury B1双臂半人形机器人
产品亮点:七大算法合一,打造智能 这三款机器人融汇了七大算法,为机器人提供更广泛的适用场景,使其能够轻松胜任更为复杂的任务。其中包括: 1、七轴算法 2、双臂算法 3、SLAM 激光导航算法 4、单目算法 5、双目算法 6、语音识别 7、GPT控制 每个算法都赋予机器人独特的能力,使其具备卓越的协同能力、智能导航、视觉感知、语音控制等多重功能。 四大操作方式 水星机器人支持四大操作方式,不仅提供了便捷的控制手段,也拓宽了其应用领域。 Blockly编程:图形化编程软件,简单易学。 VR遥控:通过VR设备进行远程遥控,实现更加灵活的操作方式。 多种编程语言支持:包括C++、Python、Matlab等。 兼容仿真平台:如ROS、Pybullet、Gazebo等,提供便捷的模拟实验环境。 五大应用场景 水星机器人系列展现了广泛的应用场景,涵盖教育、科研、服务、娱乐和远程操作等领域。无论是现场教育还是科研实验,水星机器人都能够展示出卓越的性能。 教育场景:提供场景套装,包括视觉抓取、传送带码垛抓取等,为学生提供更多学习机会。 科研平台:支持导航,并能与其他公司的移动底盘搭配使用,促进科研创新。 服务场景:咖啡店咖啡制作、工厂自动巡检控制等,提供高效的解决方案。 娱乐领域:歌舞表演、商业展示、杂技演出等,为观众带来全新娱乐体验。 危险场合操作:通过VR遥控,提供更加安全、高效的解决方案。 配件 多款外设和配件,包括手持式pad平板、2指和3指灵巧手、吸泵、自适应夹爪,支持2D和3D摄像头的添加,为用户提供丰富多彩的视觉信息。
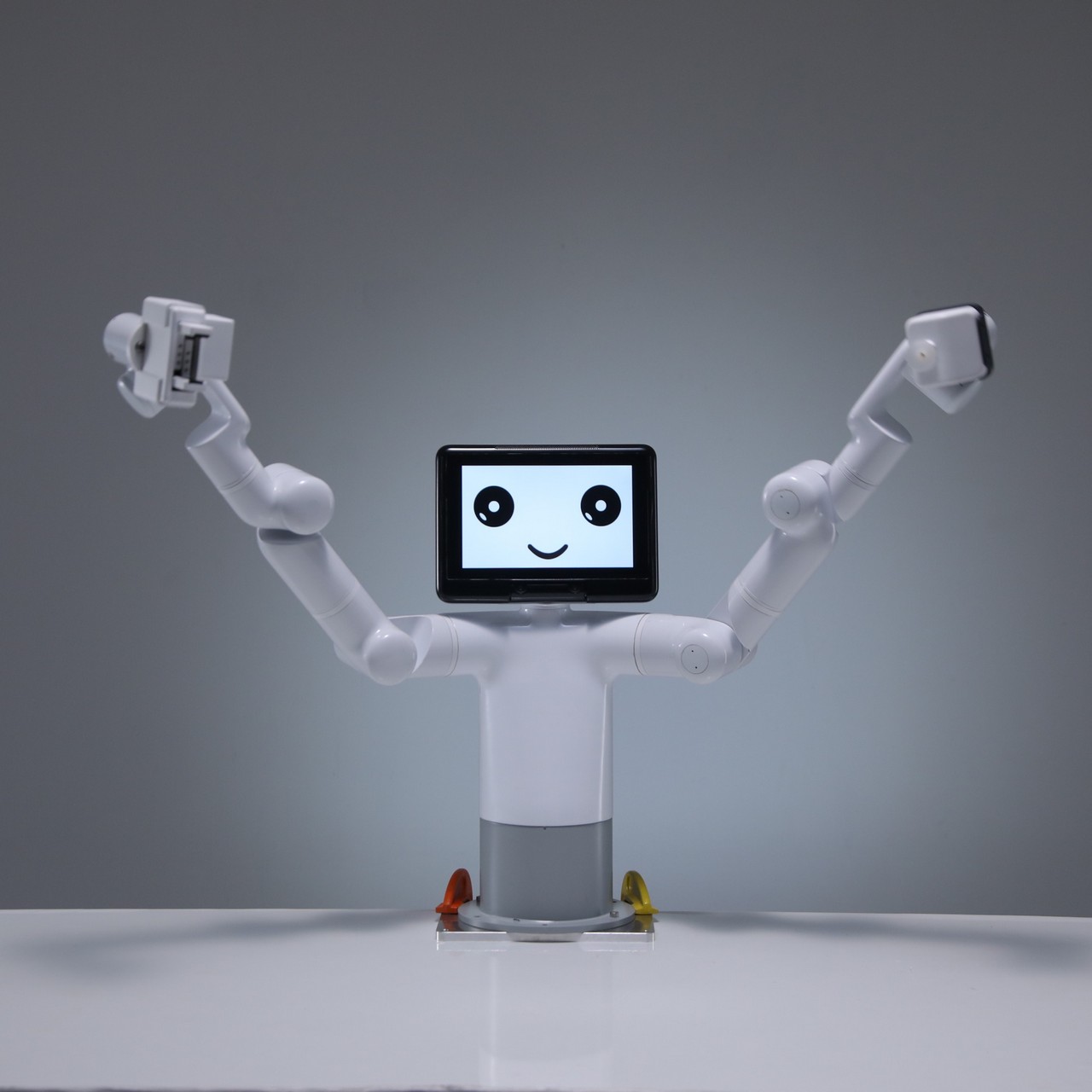
Mercury B1双臂半人形机器人共有17个自由度。 它配备两个A1七轴机械臂,具有单臂独立操作和双臂协同操作的能力。 头部配备9英寸高清液晶触摸屏,支持多点控制和用户定制表情显示。 它还配备了NVIDIA Jetson Xavier边缘计算核心作为主控模块。 高达21TOPS的AI性能结合集成的3D摄像头,可以完成2D/3D机器视觉引导、抓取和VR远程操作。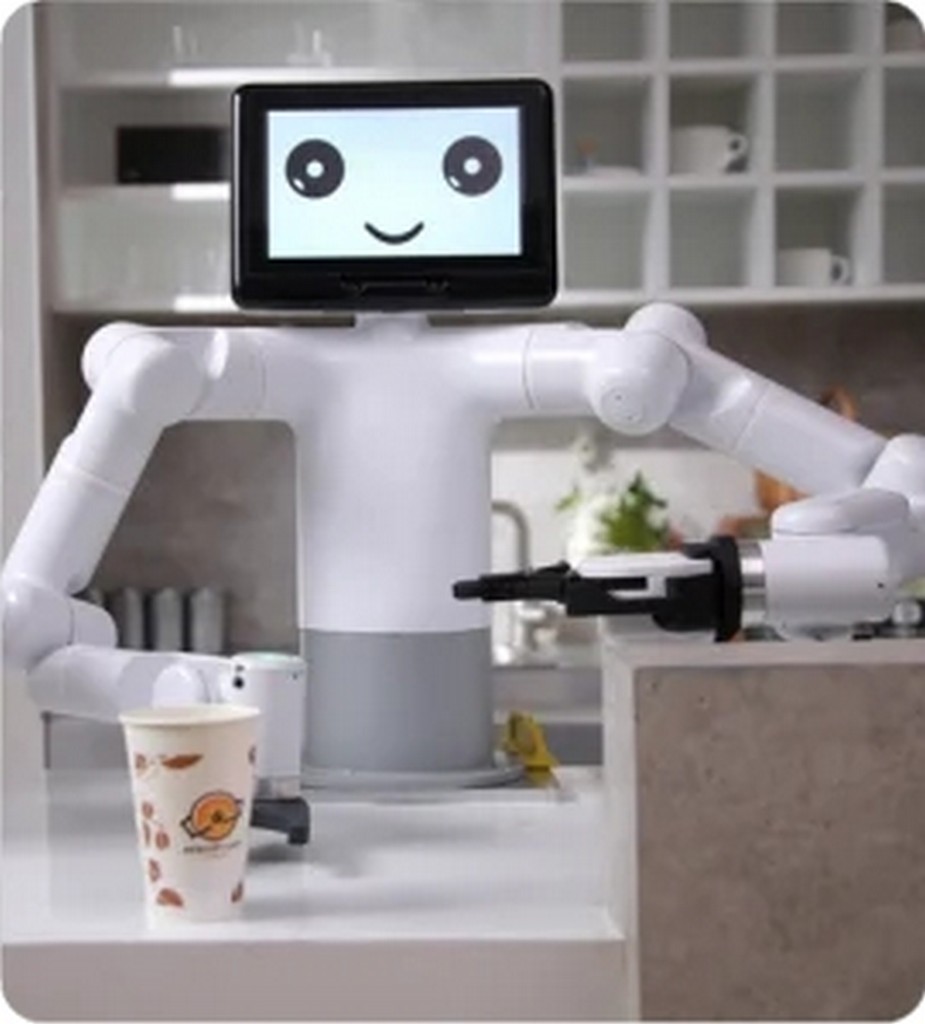
科研场景
得益于自研控制算法与自研模组的应用,B1 可用于双臂协同控制、双臂运动规划、人形具身智能应用等多个方向研究与应用,是人形机器人应用研究的首选机型。
教育场景
机器人教育教学套装,可搭配2D或3D视觉模组,可以实现人形具身智能教育中图像识别、模型训练、机器人控制、运动规划、机器人空间标定、视觉与机器人手眼标定等多个学科不同领域的知识学习。
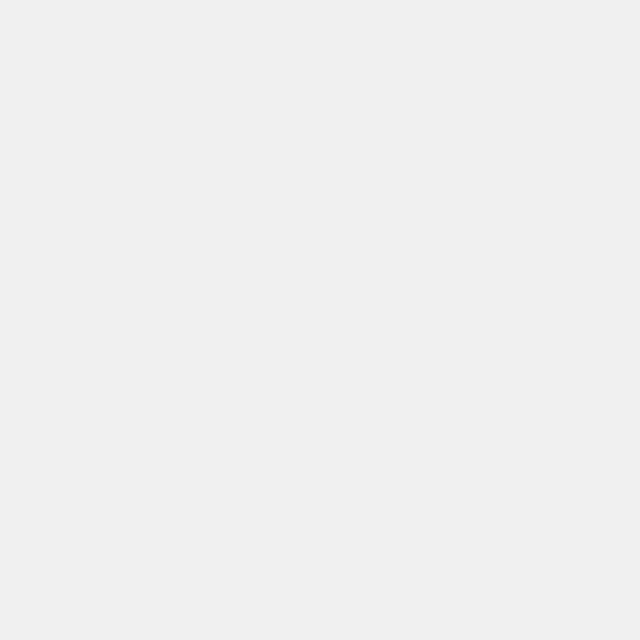
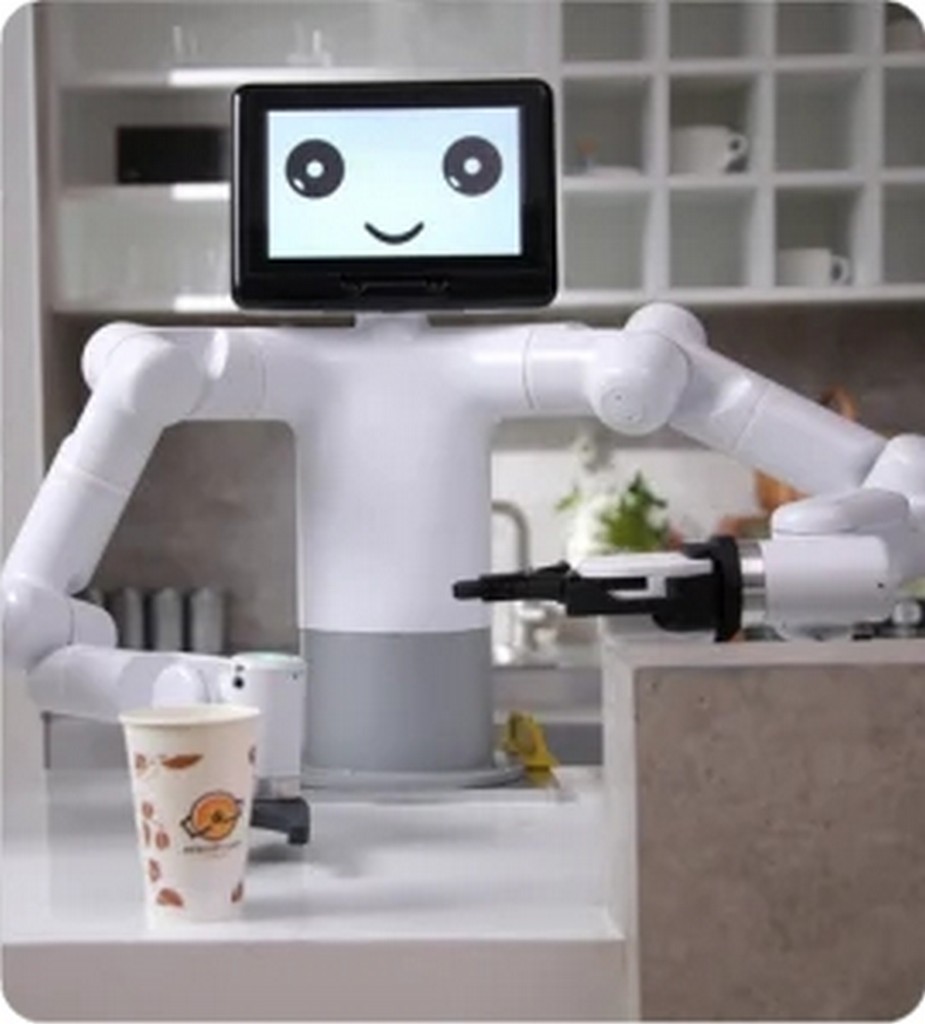
服务场景
水星Mercury系列的强悍性能及内在表现,搭配优雅的外观设计,使得水星Mercury机器人不仅可以用于教育、科研场景,也可以用于商业服务场景,通过不同的末端配件,搭配各种日常家具家电,机器人可以服务于实际的公司展示、商业展会、行业交流等应用环境,展现机器人服务员的炫酷应用。
娱乐场景
搭配自定义的末端执行器,进行模拟人类的动作开发,水星Mercury机器人可以实现类人动作应用,进行个人应用的创意开发。
VR/Aloha遥操作场景
搭配VR/Aloha等设备,实现远程操控的机器人应用
机器参数
| 指标 | 参数 |
|---|---|
| 中文名称 | 水星B1双臂机器人 |
| 型号 | 水星B1 |
| 产品尺寸 | 200*192.5*537mm |
| 自由度 | 17 |
| 最大工作半径 | 8小时 |
| 最大负载 | 1KG |
| 机械臂重复精度 | ±0.05 mm |
| 净重 | 8KG |
| 工作电压 | 24V |
| 重复精度 | +-0.05mm |
| 减速机构 | 谐波减速机 |
| 关节制动式 | 电磁摩擦片式 |
| CPU | 6核Arm v8.2 64位CPU |
| GPU | 384 核 Volta™ GPU |
| 算力 | 21 TOPS |
| 材质 | 碳纤维、铝合金、工程塑料 |
| 3D相机 | Obi Nakakotsu Deeyea |
| 麦克风阵列 | 线性4麦克风,5米180°拾音 |
| IO | 24V 6 输入,6 输出 |
| 屏幕 | 9寸触摸屏 |
| 通讯方式 | CAN总线/WIFI/网口/蓝牙/USB/串口 |
