顶视导航
案例详情
客户痛点:
长期以来,机器人定位领域使用二维码、磁导航和激光导航等技术。
然而,诸如二维码、磁导航等技术施工量大,难以适应复杂、变动的工业环境、后续维护成本高昂。
激光导航技术虽摆脱了地面铺设辅助定位设施铺设的繁琐,但工厂环境中常见的不锈钢、玻璃等材质,以及工厂正常运行中的人员、车辆和物流都会影响激光导航的性能。
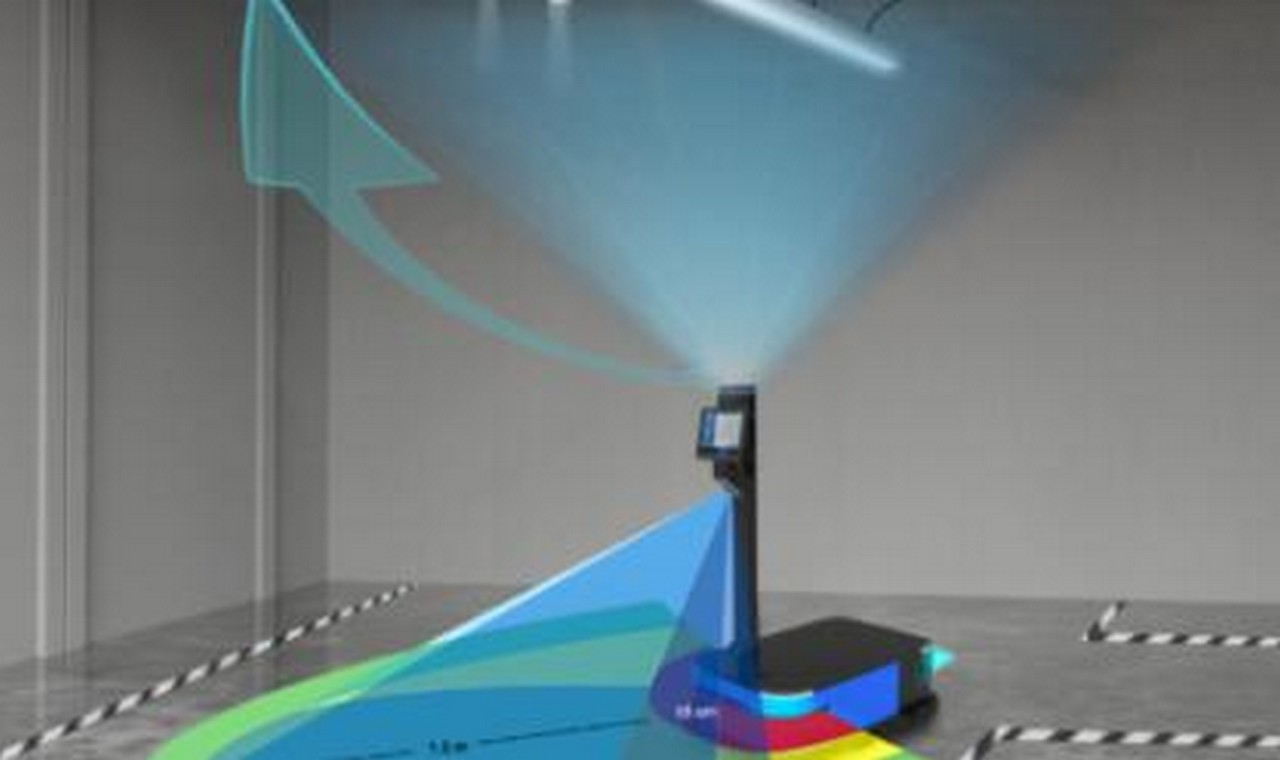
迈尔微视AGV顶视导航方案:
该方案利用3D摄像头和AI算法,通过扫描工厂环境中上部信息进行建图,只需让机器人自主沿着路径行走一圈,即可录入数据。这种方法在提高建图效率、减少工作量的同时,制作出比传统二维码、磁导航和激光导航更精细、更准确的地图。
技术优势:
灵活适应多种场地:2-12m顶高厂房, 长距离窄道等环境均可正常运作
平稳运行无干扰:无惧高动态人、车、物流
重复到点精度高达±1cm
多种机型适配:应用案例丰富,提供优秀的机器视觉体验